Direksyon ng vector. Ang pangunahing pag-aari ng mga cosiine ng direksyon Mga anggulo ng direksyon at mga cosiine ng direksyon ng isang vector
ito ang mga cosine ng mga anggulo na nabuo ng vector na may positibong semi-axes ng mga coordinate. Ang mga direction cosine ay natatanging tumutukoy sa direksyon ng vector. Kung ang isang vector ay may haba 1, kung gayon ang mga cosine ng direksyon nito ay katumbas ng mga coordinate nito. Sa pangkalahatan, para sa isang vector na may mga coordinate ( a; b; c) ang mga cosine ng direksyon ay pantay:
kung saan ang a, b, g ay ang mga anggulo na ginawa ng vector na may mga axes x, y, z ayon sa pagkakabanggit.
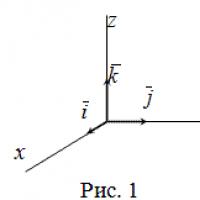
21) Pagkabulok ng isang vector sa mga vector ng yunit. Ang unit vector ng coordinate axis ay tinutukoy ng , ang axes ng , at ang axes ng (Fig. 1).

Para sa anumang vector na nasa eroplano, nagaganap ang sumusunod na pagpapalawak:
Kung ang vector ![]() na matatagpuan sa espasyo, pagkatapos ay ang pagpapalawak sa mga vector ng yunit ng mga coordinate axes ay may anyo:
na matatagpuan sa espasyo, pagkatapos ay ang pagpapalawak sa mga vector ng yunit ng mga coordinate axes ay may anyo:
22)Produktong tuldok dalawang di-zero na mga vector at ang bilang na katumbas ng produkto ng mga haba ng mga vector na ito at ang cosine ng anggulo sa pagitan ng mga ito ay tinatawag na:
23) Anggulo sa pagitan ng dalawang vector
Kung ang anggulo sa pagitan ng dalawang vector ay talamak, kung gayon ang kanilang scalar product ay positibo; kung ang anggulo sa pagitan ng mga vector ay mahina, kung gayon ang scalar product ng mga vector na ito ay negatibo. Ang scalar product ng dalawang nonzero vectors ay katumbas ng zero kung at kung orthogonal lang ang mga vector na ito.
24) Ang kondisyon ng parallelism at perpendicularity ng dalawang vectors.
Kundisyon para sa mga vector na maging patayo
Ang mga vector ay patayo kung at kung ang kanilang scalar product ay zero. Ang mga vector na ito ay magiging patayo kung ang expression na xaxb + yayb = 0.

25) Vector na produkto ng dalawang vectors.
Ang vector product ng dalawang non-collinear vectors ay isang vector c=a×b na nakakatugon sa mga sumusunod na kondisyon: 1) |c|=|a| |b| sin(a^b) 2) c⊥a, c⊥b 3) Ang mga vector a, b, c ay bumubuo ng kanang-kamay na triplet ng mga vector.
26) Collinear at coplanar vectors..
Ang mga vector ay collinear kung ang abscissa ng unang vector ay nauugnay sa abscissa ng pangalawa sa parehong paraan tulad ng ordinate ng una ay sa ordinate ng pangalawa a (xa;oo) At b (xb;yb). Ang mga vector na ito ay collinear kung xa = x b At y a = y b, Saan R.
Mga Vector −→ a,−→b at −→ c ay tinatawag coplanar, kung mayroong isang eroplano kung saan sila ay parallel.
27) Pinaghalong produkto ng tatlong vectors. Pinaghalong produkto ng mga vector- scalar product ng vector a at ang vector product ng vectors b at c. Hanapin ang pinaghalong produkto ng mga vectors a = (1; 2; 3), b = (1; 1; 1), c = (1; 2; 1).
Solusyon:
1·1·1 + 1·1·2 + 1·2·3 - 1·1·3 - 1·1·2 - 1·1·2 = 1 + 2 + 6 - 3 - 2 - 2 = 2
28) Ang distansya sa pagitan ng dalawang punto sa isang eroplano. Ang distansya sa pagitan ng dalawang ibinigay na mga punto ay katumbas ng square root ng kabuuan ng mga squared na pagkakaiba ng parehong mga coordinate ng mga puntong ito.
29) Dibisyon ng isang segment sa kaugnayang ito. Kung ang puntong M(x; y) ay nasa isang linyang dumadaan sa dalawang ibinigay na mga punto ( , ) at ( , ), at isang ugnayan ang ibinigay kung saan ang puntong M ay naghahati sa segment , kung gayon ang mga coordinate ng punto M ay tinutukoy ng mga formula
Kung ang point M ay ang midpoint ng segment, ang mga coordinate nito ay tinutukoy ng mga formula
30-31. Slope ng isang tuwid na linya ay tinatawag na padaplis ng anggulo ng pagkahilig ng linyang ito. Ang slope ng isang tuwid na linya ay karaniwang tinutukoy ng titik k. Pagkatapos ay sa pamamagitan ng kahulugan
Equation ng isang tuwid na linya na may slope may form kung saan k- tuwid na linya slope, b– ilang totoong numero. Gamit ang equation ng isang tuwid na linya na may isang angle coefficient, maaari mong tukuyin ang anumang tuwid na linya na hindi parallel sa axis Oy(para sa isang tuwid na linya parallel sa ordinate axis, ang angular coefficient ay hindi tinukoy).
33. Pangkalahatang equation ng isang tuwid na linya sa isang eroplano. Equation ng form ![]() meron pangkalahatang equation ng isang linya Oxy. Depende sa mga halaga ng mga constants A, B at C, posible ang mga sumusunod na espesyal na kaso:
meron pangkalahatang equation ng isang linya Oxy. Depende sa mga halaga ng mga constants A, B at C, posible ang mga sumusunod na espesyal na kaso:
C = 0, A ≠0, B ≠ 0 – ang tuwid na linya ay dumadaan sa pinanggalingan
A = 0, B ≠0, C ≠0 (By + C = 0) - tuwid na linya na kahanay ng Ox axis
B = 0, A ≠0, C ≠ 0 (Ax + C = 0) – tuwid na linya na kahanay ng Oy axis
B = C = 0, A ≠0 – ang tuwid na linya ay tumutugma sa Oy axis
A = C = 0, B ≠0 – ang tuwid na linya ay tumutugma sa axis ng Ox
34.Equation ng isang linya sa mga segment sa isang eroplano sa isang rectangular coordinate system Oxy may form kung saan a At b- ilang mga hindi-zero na tunay na numero. Ang pangalan na ito ay hindi sinasadya, dahil ang mga ganap na halaga ng mga numero A At b katumbas ng haba ng mga segment na pinuputol ng tuwid na linya sa mga coordinate axes baka At Oy ayon sa pagkakabanggit (ang mga segment ay binibilang mula sa pinanggalingan). Kaya, ang equation ng isang linya sa mga segment ay nagpapadali sa pagbuo ng linyang ito sa isang drawing. Upang gawin ito, dapat mong markahan ang mga puntos na may mga coordinate at sa isang hugis-parihaba na coordinate system sa eroplano, at gumamit ng isang ruler upang ikonekta ang mga ito sa isang tuwid na linya.
35. Ang normal na equation ng isang linya ay may anyo
saan ang distansya mula sa tuwid na linya hanggang sa pinanggalingan; – ang anggulo sa pagitan ng normal sa linya at ng axis.
Ang normal na equation ay maaaring makuha mula sa pangkalahatang equation (1) sa pamamagitan ng pagpaparami nito sa normalizing factor, ang sign ay kabaligtaran ng sign upang .
Ang mga cosine ng mga anggulo sa pagitan ng tuwid na linya at ng coordinate axes ay tinatawag na direction cosine, – ang anggulo sa pagitan ng tuwid na linya at axis, – sa pagitan ng tuwid na linya at axis:
Kaya, ang normal na equation ay maaaring isulat sa anyo
Distansya mula sa punto sa isang tuwid na linya tinutukoy ng formula 
36. Ang distansya sa pagitan ng isang punto at isang linya ay kinakalkula gamit ang sumusunod na formula: ![]()
kung saan ang x 0 at y 0 ay ang mga coordinate ng punto, at ang A, B at C ay mga coefficient mula sa pangkalahatang equation ng linya
37. Pagbabawas ng pangkalahatang equation ng isang linya sa normal. Ang isang equation at isang eroplano sa kontekstong ito ay hindi naiiba sa bawat isa sa anumang bagay maliban sa bilang ng mga termino sa mga equation at ang dimensyon ng espasyo. Samakatuwid, una kong sasabihin ang lahat tungkol sa eroplano, at sa huli ay gagawa ako ng reserbasyon tungkol sa tuwid na linya.
Hayaang ibigay ang pangkalahatang equation ng eroplano: Ax + By + Cz + D = 0.
;. nakukuha natin ang system: g;Mc=cosb, MB=cosa Dalhin natin ito sa normal na anyo. Upang gawin ito, pinarami namin ang magkabilang panig ng equation sa pamamagitan ng normalizing factor na M. Nakukuha namin ang: Max+Mvu+MCz+MD=0. Sa kasong ito MA=cos;.g;Mc=cosb, MB=cosa makuha namin ang system:
M2 B2=cos2b
M2 C2=cos2g
Ang pagdaragdag ng lahat ng mga equation ng system, makakakuha tayo ng M*(A2 + B2 + C2) = 1 Ngayon ang natitira na lang ay ipahayag ang M mula dito upang malaman kung saan normalizing factor ang orihinal na pangkalahatang equation ay dapat na i-multiply upang dalhin ito sa normal na anyo:
M=-+1/ROOT KV A2 +B2 +C2
Ang MD ay dapat palaging mas mababa sa zero, samakatuwid ang tanda ng numerong M ay kinuha sa tapat ng tanda ng numero D.
Sa equation ng isang tuwid na linya, ang lahat ay pareho, tanging mula sa formula para sa M dapat mong alisin lamang ang terminong C2.
| Ax + Sa pamamagitan ng + Cz + D = 0, |
38.Pangkalahatang equation ng eroplano sa espasyo ay tinatawag na equation ng anyo
saan A 2 + B 2 + C 2 ≠ 0 .
Sa tatlong-dimensional na espasyo sa Cartesian coordinate system, ang anumang eroplano ay inilalarawan ng isang equation ng 1st degree (linear equation). At sa kabaligtaran, ang anumang linear equation ay tumutukoy sa isang eroplano.
40.Equation ng isang eroplano sa mga segment. Sa isang rectangular coordinate system Oxyz sa three-dimensional space isang equation ng form  , Saan a, b At c– tinatawag na non-zero real numbers equation ng eroplano sa mga segment. Ganap na halaga ng mga numero a, b At c katumbas ng haba ng mga segment na pinuputol ng eroplano sa mga coordinate axes baka, Oy At Oz ayon sa pagkakabanggit, pagbibilang mula sa pinanggalingan. Tanda ng mga numero a, b At c nagpapakita kung saang direksyon (positibo o negatibo) ang mga segment ay naka-plot sa mga coordinate axes
, Saan a, b At c– tinatawag na non-zero real numbers equation ng eroplano sa mga segment. Ganap na halaga ng mga numero a, b At c katumbas ng haba ng mga segment na pinuputol ng eroplano sa mga coordinate axes baka, Oy At Oz ayon sa pagkakabanggit, pagbibilang mula sa pinanggalingan. Tanda ng mga numero a, b At c nagpapakita kung saang direksyon (positibo o negatibo) ang mga segment ay naka-plot sa mga coordinate axes
41) Normal na equation ng eroplano.
Ang normal na equation ng isang eroplano ay ang equation nito na nakasulat sa anyo
kung saan ang , , ay ang mga direksyon na cosines ng eroplanong normal, e
p ay ang distansya mula sa pinanggalingan sa eroplano. Kapag kinakalkula ang mga direksyon ng cosine ng normal, dapat itong ipagpalagay na ito ay nakadirekta mula sa pinanggalingan hanggang sa eroplano (kung ang eroplano ay dumaan sa pinanggalingan, kung gayon ang pagpili ng positibong direksyon ng normal ay walang malasakit).
42) Distansya mula sa isang punto hanggang sa isang eroplano.Hayaang ibigay ang eroplano sa pamamagitan ng equation ![]() at isang punto ang ibinigay. Pagkatapos ang distansya mula sa punto hanggang sa eroplano ay tinutukoy ng formula
at isang punto ang ibinigay. Pagkatapos ang distansya mula sa punto hanggang sa eroplano ay tinutukoy ng formula
 |
Patunay. Ang distansya mula sa isang punto patungo sa isang eroplano ay, sa pamamagitan ng kahulugan, ang haba ng patayo na iginuhit mula sa punto hanggang sa eroplano
Anggulo sa pagitan ng mga eroplano
Hayaan ang mga eroplano at matukoy ng mga equation at , ayon sa pagkakabanggit. Kailangan mong hanapin ang anggulo sa pagitan ng mga eroplanong ito.
Ang mga eroplano, intersecting, ay bumubuo ng apat na dihedral na anggulo: dalawang obtuse at dalawang acute o apat na right angle, at ang parehong obtuse na mga anggulo ay pantay sa isa't isa, at ang parehong acute na mga anggulo ay pantay din sa isa't isa. Palagi kaming maghahanap ng isang matinding anggulo. Upang matukoy ang halaga nito, kumuha kami ng isang punto sa linya ng intersection ng mga eroplano at sa puntong ito sa bawat isa
eroplano, gumuhit kami ng mga patayo sa linya ng intersection.
Ang kabuuan ng mga parisukat ng mga cosine ng direksyon ay katumbas ng isa.
Kung ang mga direksyon ng cosine ng vector ay kilala, kung gayon ang mga coordinate nito ay matatagpuan gamit ang mga formula: Ang mga katulad na formula ay nalalapat sa tatlong-dimensional na kaso - kung ang mga direksyon ng cosine ng vector ay kilala, kung gayon ang mga coordinate nito ay matatagpuan gamit ang mga formula:
9 Linear dependence at linear independence ng mga vectors. Batay sa eroplano at sa kalawakan
Ang isang hanay ng mga vector ay tinatawag sistema ng mga vector.
nakadepende sa linear, kung may mga numero na hindi lahat ay katumbas ng zero sa parehong oras, iyon
Ang isang sistema ng mga vector ay tinatawag linearly independent, kung ang pagkakapantay-pantay ay posible lamang para sa , ibig sabihin. kapag ang linear na kumbinasyon sa kaliwang bahagi ng pagkakapantay-pantay ay walang halaga.
1. Ang isang vector ay bumubuo rin ng isang sistema: at - linearly dependent, at at - linearly independent.
2. Anumang bahagi ng isang sistema ng mga vector ay tinatawag subsystem.
1. Kung ang isang sistema ng mga vector ay may kasamang zero vector, ito ay linearly dependent
2. Kung ang isang sistema ng mga vector ay may dalawang pantay na vectors, ito ay linearly na umaasa.
3. Kung ang isang sistema ng mga vector ay may dalawang proporsyonal na mga vector, kung gayon ito ay linearly na umaasa.
4. Ang isang sistema ng mga vector ay linearly dependent kung at kung hindi bababa sa isa sa mga vector ay isang linear na kumbinasyon ng iba.
5. Anumang mga vector na kasama sa isang linearly independent system ay bumubuo ng isang linearly independent subsystem.
6. Ang isang sistema ng mga vector na naglalaman ng isang linearly dependent subsystem ay linearly dependent.
7. Kung ang isang sistema ng mga vector ay linearly na independyente, at pagkatapos magdagdag ng isang vector dito ito ay lumalabas na linearly dependent, kung gayon ang vector ay maaaring mapalawak sa mga vectors , at, bukod dito, sa isang natatanging paraan, i.e. ang mga koepisyent ng pagpapalawak ay maaaring matagpuan nang natatangi.
Batayan sa isang eroplano at sa kalawakan ay tinatawag na isang pinakamataas na sistema ng mga vector na linearly independiyente sa isang eroplano o sa kalawakan (pagdaragdag ng isa pang vector sa system ay ginagawa itong linearly dependent).
Kaya, ang batayan sa isang eroplano ay anumang dalawang di-collinear na vector na kinuha sa isang tiyak na pagkakasunud-sunod, at isang batayan sa kalawakan ay anumang tatlong di-coplanar na vector na kinuha sa isang tiyak na pagkakasunud-sunod.
Hayaang maging batayan sa kalawakan, kung gayon, ayon sa T. 3, ang anumang vector ng espasyo ay maaaring mabulok sa isang natatanging paraan sa mga batayan na vector: . Ang mga koepisyent ng pagpapalawak ay tinatawag na mga coordinate ng vector sa batayan
Pagsusulat ng mga linear na operasyon sa mga vector sa pamamagitan ng mga coordinate:
a) karagdagan at pagbabawas: - batayan
b) pagpaparami ng bilang R:
Ang mga formula ay sumusunod mula sa mga katangian ng mga linear na operasyon.
10 Mga coordinate ng vector na may kaugnayan sa batayan. Orty
Batayan sa libreng vector space V 3 ay anumang ordered triple ng non-coplanar vectors.
Hayaan SA :a 1,a 2,a 3– nakapirming batayan sa V 3.
Mga coordinate vector b kaugnay sa batayan SA tinatawag na ordered triple of numbers ( x, y, z), kasama ang. b=x· isang 1 +yisang 2 +z· isang 3.
pagtatalaga:b={x, y, z} B Tandaan: Ang mga coordinate ng isang nakapirming vector ay nangangahulugan ng mga coordinate ng kaukulang libreng vector.
Teorama1: Ang pagsusulatan sa pagitan ng V 3 at R 3 para sa isang nakapirming batayan ay isa-sa-isa, i.e. b V 3 ! {x, y, z) R 3 at ( x, y, z) R 3 ! b V 3, kasama b={x, y, z} B
Ang pagsusulatan sa pagitan ng isang vector at mga coordinate nito sa isang partikular na batayan ay may mga sumusunod na katangian:
1. Hayaan b 1 ={x 1 , y 1 , z 1} B , b 2 ={x 2 , y 2 , z 2} B b 1 + b 2 ={x 1 + x 2 , y 1 + y 2 , z 1 + z 2} B
2. Hayaan b={x, y, z} B , λR λ b={ λ· x, λ· y, λ· z} B
3. Hayaan b 1 || b 2 , b 1 = {x 1 , y 1 , z 1} B
, b 2 ={x 2 , y 2 , z 2} B
(Dito: anumang numero).
Unit vector Ang , na nakadirekta sa X axis, ay tinutukoy i, unit vector, nakadirekta sa kahabaan ng Y axis, ay tinutukoy j, A unit vector, na nakadirekta sa Z axis, ay tinutukoy k. Mga vector i, j, k ay tinatawag orts– mayroon silang iisang module, ibig sabihin
i = 1, j = 1, k = 1
11 scalar na produkto ng mga vector. Anggulo sa pagitan ng mga vector. Kundisyon para sa vector orthogonality
Ito ay isang numero na katumbas ng produkto ng mga haba ng mga vector na ito at ang cosine ng anggulo sa pagitan ng mga ito.
Dot product ng mga vector sa mga tuntunin ng kanilang mga coordinate
Tuldok na produkto ng mga vector X, Y, Z at :
saan ang anggulo sa pagitan ng mga vectors at ; kung alinman, pagkatapos
Mula sa kahulugan ng produktong scalar ay sumusunod na kung saan, halimbawa, ay ang magnitude ng projection ng vector papunta sa direksyon ng vector.
Scalar squared vector:
Mga katangian ng produkto ng tuldok:
Anggulo sa pagitan ng mga vector
Mga kundisyon para sa vector orthogonality.
Dalawa vector a at b orthogonal (patayo), kung ang kanilang scalar product ay katumbas ng zero a· b= 0
Kaya sa kaso ng problema sa vector ng eroplano
a= (a x ;a y )at b= (b x ;b y )
orthogonal ifa b= a x b x + a y b y = 0
12 produkto ng vector ng mga vector, mga katangian nito. Kondisyon para sa collinearity ng mga vectors
Ang cross product ng isang vector at isang vector ay isang vector na tinutukoy ng isang simbolo at tinukoy ng sumusunod na tatlong kundisyon:
1). Ang modulus ng vector ay katumbas ng , kung saan ang anggulo sa pagitan ng mga vector at ;
2). Ang vector ay patayo sa bawat isa sa mga vector at ;
3). Ang direksyon ng vector ay tumutugma sa "right hand rule". Nangangahulugan ito na kung ang mga vectors , at dinadala sa isang karaniwang pinagmulan, kung gayon ang vector ay dapat idirekta sa parehong paraan tulad ng gitnang daliri ng kanang kamay, ang hinlalaki nito ay nakadirekta kasama ang unang kadahilanan (iyon ay, kasama ang vector), at ang hintuturo - kasama ang pangalawa (iyon ay, kasama ang vector). Ang produkto ng vector ay nakasalalay sa pagkakasunud-sunod ng mga kadahilanan, katulad: .
Ang modulus ng produkto ng vector ay katumbas ng lugar S ng isang paralelogram na itinayo sa mga vector at : .
Ang produkto ng vector mismo ay maaaring ipahayag ng formula,
nasaan ang unit vector ng vector product.
Ang cross product ay naglalaho kung at kung ang mga vectors at ay collinear. Sa partikular, .
Kung tama ang coordinate axes system at ang mga vectors at tinukoy sa system na ito ng kanilang mga coordinate:
pagkatapos ay ang produkto ng vector ng isang vector at isang vector ay tinutukoy ng formula
Ang isang vector ay collinear sa isang nonzero vector kung at kung ang mga coordinate lamang
ang mga vector ay proporsyonal sa kaukulang mga coordinate ng vector, i.e.
Ang mga linear na operasyon sa mga vector na tinukoy ng kanilang mga coordinate sa espasyo ay ginaganap sa katulad na paraan.
13 halo-halong produkto ng mga vector. Mga katangian nito. Kondisyon para sa coplanarity ng mga vectors
Pinaghalong produkto ng tatlong vectors, , ay isang numero na katumbas ng scalar product ng isang vector at isang vector:
Mga katangian ng isang halo-halong produkto:
3° Tatlong vector ay coplanar kung at kung lamang
4° Tama ang triple ng mga vector kung at kung . Kung , pagkatapos ay ang mga vectors , at bumuo ng kaliwang triplet ng mga vectors.
10° pagkakakilanlan ni Jacobi:
Kung ang mga vectors , at ibinibigay ng kanilang mga coordinate, kung gayon ang kanilang pinaghalong produkto ay kinakalkula ng formula
Ang mga vector na parallel sa isang eroplano o nakahiga sa parehong eroplano ay tinatawag mga coplanar vector.
Mga kondisyon para sa coplanarity ng mga vector
Tatlo Ang mga vector ay coplanar kung ang kanilang pinaghalong produkto ay zero.
Tatlo Ang mga vector ay coplanar kung sila ay linearly dependent.
15 iba't ibang uri ng line at plane equation
Anumang tuwid na linya sa eroplano ay maaaring tukuyin ng isang first-order equation
Ax + Wu + C = 0,
Bukod dito, ang mga constants A at B ay hindi katumbas ng zero sa parehong oras. Tinatawag itong first order equation pangkalahatang equation ng isang tuwid na linya. Depende sa mga halaga ng mga constants A, B at C, posible ang mga sumusunod na espesyal na kaso:
C = 0, A ≠0, B ≠ 0 – ang tuwid na linya ay dumadaan sa pinanggalingan
A = 0, B ≠0, C ≠0 (By + C = 0) - tuwid na linya na kahanay ng Ox axis
B = 0, A ≠0, C ≠ 0 (Ax + C = 0) – tuwid na linya na kahanay ng Oy axis
B = C = 0, A ≠0 – ang tuwid na linya ay tumutugma sa Oy axis
A = C = 0, B ≠0 – ang tuwid na linya ay tumutugma sa axis ng Ox
Ang equation ng isang tuwid na linya ay maaaring ipakita sa iba't ibang anyo depende sa anumang naibigay na paunang kondisyon.
Mga cosiine ng direksyon ng isang vector.
Direction cosines ng vector a ay ang mga cosine ng mga anggulo na nabuo ng vector na may positibong semi-axes ng mga coordinate.
Upang mahanap ang mga direksyon ng cosine ng vector a, kinakailangan na hatiin ang kaukulang mga coordinate ng vector sa ganap na halaga ng vector.
Ari-arian: Ang kabuuan ng mga parisukat ng mga cosine ng direksyon ay katumbas ng isa.
Kaya sa kaso ng problema sa eroplano Ang mga direksyon na cosiine ng vector a = (ax; ay) ay matatagpuan sa pamamagitan ng mga formula:
Isang halimbawa ng pagkalkula ng mga cosiine ng direksyon ng isang vector:
Hanapin ang mga cosines ng direksyon ng vector a = (3; 4).
Solusyon: |a| =
Kaya sa kaso ng spatial problem Ang mga direksyon cosine ng vector a = (ax; ay; az) ay matatagpuan sa pamamagitan ng mga formula:
Isang halimbawa ng pagkalkula ng mga cosiine ng direksyon ng isang vector
Hanapin ang mga direksyon na cosines ng vector a = (2; 4; 4).
Solusyon: |a| =
|
Ang direksyon ng vector sa espasyo ay tinutukoy ng mga anggulo na nabuo ng vector gamit ang mga coordinate axes (Larawan 12). Ang mga cosine ng mga anggulong ito ay tinatawag mga cosiine ng direksyon ng vector: , , .
Mula sa mga katangian ng projection:, , . Kaya naman, Madaling ipakita iyon 2) ang mga coordinate ng anumang unit vector ay nag-tutugma sa direksyon ng mga cosine: . |

"Paano makahanap ng mga direksyon ng cosines ng isang vector"
Ipahiwatig sa pamamagitan ng alpha, beta at gamma ang mga anggulo na nabuo ng vector a na may positibong direksyon ng mga coordinate axes (tingnan ang Fig. 1). Ang mga cosine ng mga anggulong ito ay tinatawag na direction cosine ng vector a.
Dahil ang mga coordinate a sa Cartesian rectangular coordinate system ay katumbas ng mga projection ng vector sa coordinate axes, pagkatapos ay a1 = |a|cos(alpha), a2 = |a|cos(beta), a3 = |a|cos (gamma). Kaya naman: cos (alpha)=a1||a|, cos(beta) =a2||a|, cos(gamma)= a3/|a|. Sa kasong ito |a|=sqrt(a1^2+ a2^2+ a3^2). Kaya cos (alpha)=a1|sqrt(a1^2+ a2^2+ a3^2), cos(beta) =a2|sqrt(a1^2+ a2^2+ a3^2), cos(gamma)= a3/sqrt(a1^2+ a2^2+ a3^2).
Dapat pansinin ang pangunahing pag-aari ng mga cosine ng direksyon. Ang kabuuan ng mga parisukat ng mga cosine ng direksyon ng isang vector ay katumbas ng isa. Sa katunayan, cos^2(alpha)+cos^2(beta)+cos^2(gamma)= = a1^2|(a1^2+ a2^2+ a3^2)+ a2^2|(a1^2 + a2^2+ a3^2)+ a3^2/(a1^2+ a2^2+ a3^2) = =(a1^2+ a2^2+ a3^2)|(a1^2+ a2^ 2+ a3^2) = 1.
Unang paraan
Halimbawa: ibinigay: vector a=(1, 3, 5). Hanapin ang mga cosine ng direksyon nito. Solusyon. Alinsunod sa aming nahanap, isinulat namin ang: |a|= sqrt(ax^2+ ay^2+ az^2)=sqrt(1+9 +25)=sqrt(35)=5.91. Kaya, ang sagot ay maaaring isulat sa sumusunod na anyo: (cos(alpha), cos(beta), cos(gamma))=(1/sqrt(35), 3/sqrt(35), 5/(35)) =( 0.16;0.5;0.84).
Pangalawang paraan
Kapag hinahanap ang mga direksyon ng cosine ng vector a, maaari mong gamitin ang pamamaraan ng pagtukoy ng mga cosine ng mga anggulo gamit ang scalar product. Sa kasong ito, ang ibig sabihin namin ay ang mga anggulo sa pagitan ng a at ang mga vector ng unit ng direksyon ng mga rectangular Cartesian coordinate i, j at k. Ang kanilang mga coordinate ay (1, 0, 0), (0, 1, 0), (0, 0, 1), ayon sa pagkakabanggit. Dapat itong alalahanin na ang scalar product ng mga vectors ay tinukoy bilang mga sumusunod.
Kung ang anggulo sa pagitan ng mga vector ay φ, kung gayon ang produkto ng scalar ng dalawang hangin (sa kahulugan) ay isang numero na katumbas ng produkto ng moduli ng mga vector at cosφ. (a, b) = |a||b|cos f. Pagkatapos, kung b=i, kung gayon (a, i) = |a||i|cos(alpha), o a1 = |a|cos(alpha). Dagdag pa, ang lahat ng mga aksyon ay isinasagawa nang katulad sa pamamaraan 1, na isinasaalang-alang ang mga coordinate j at k.
Ari-arian:
cos 2 α + cos 2 β + cos 2 γ = 1
b) kahulugan ng mga linear na operasyon
ang kabuuan ng dalawang di-collinear na vector ay isang vector na nagmumula sa karaniwang pinagmulan ng mga vector sa kahabaan ng dayagonal ng isang paralelogram na binuo sa mga vector na ito

Ang pagkakaiba ng vector ay ang kabuuan ng isang vector at isang vector na kabaligtaran ng vector: ![]() . Ikonekta natin ang mga simula ng mga vector at , pagkatapos ay ang vector ay nakadirekta mula sa dulo ng vector hanggang sa dulo ng vector.
. Ikonekta natin ang mga simula ng mga vector at , pagkatapos ay ang vector ay nakadirekta mula sa dulo ng vector hanggang sa dulo ng vector. 
Ang trabaho ang isang vector sa pamamagitan ng isang numero ay tinatawag na isang vector na may modulus , at sa at sa . Sa geometriko, ang multiplikasyon sa isang numero ay nangangahulugang "pag-unat" ng vector sa pamamagitan ng isang salik, pinapanatili ang direksyon sa at nagbabago sa kabaligtaran sa .
Mula sa mga panuntunan sa itaas para sa pagdaragdag ng mga vector at pagpaparami ng mga ito sa isang numero, ang mga malinaw na pahayag ay sumusunod:
1. ![]() (Ang karagdagan ay commutative);
(Ang karagdagan ay commutative);
2. ![]() (ang karagdagan ay nag-uugnay);
(ang karagdagan ay nag-uugnay);
3. ![]() (pagkakaroon ng zero vector);
(pagkakaroon ng zero vector);
4. ![]() (pagkakaroon ng isang kabaligtaran na vector);
(pagkakaroon ng isang kabaligtaran na vector);
5. ![]() (ang karagdagan ay nag-uugnay);
(ang karagdagan ay nag-uugnay);
6. (Ang multiplikasyon sa isang numero ay distributive);
7. ![]() (Ang pagdaragdag ng vector ay distributive);
(Ang pagdaragdag ng vector ay distributive);
c) produktong scalar at ang mga pangunahing katangian nito
Produktong tuldok ang dalawang di-zero na vector ay isang numero na katumbas ng produkto ng mga haba ng mga vector na ito at ang cosine ng anggulo sa pagitan ng mga ito. Kung ang hindi bababa sa isa sa dalawang vector ay zero, kung gayon ang anggulo sa pagitan ng mga ito ay hindi tinukoy, at ang scalar na produkto ay itinuturing na katumbas ng zero. Ang scalar na produkto ng mga vectors at denoted
 , kung saan at ang mga haba ng mga vector at , ayon sa pagkakabanggit, at ang anggulo sa pagitan ng mga vector at .
, kung saan at ang mga haba ng mga vector at , ayon sa pagkakabanggit, at ang anggulo sa pagitan ng mga vector at .
Ang scalar product ng isang vector na may sarili nito ay tinatawag na scalar square.
Mga katangian ng produktong scalar.
Para sa anumang mga vector at ang mga sumusunod ay totoo: katangian ng produkto ng tuldok:
ang commutative property ng isang scalar product;
distributive na ari-arian  o
o  ;
;
nag-uugnay na ari-arian  o
o  , kung saan ay isang arbitrary tunay na numero;
, kung saan ay isang arbitrary tunay na numero;
ang scalar square ng isang vector ay palaging hindi negatibo kung at kung ang vector ay zero.
D) produkto ng vector at mga katangian nito
produkto ng vector Ang vector a hanggang vector b ay tinatawag na vector c, ang haba nito ay katumbas ng numero sa lugar ng parallelogram na itinayo sa mga vectors a at b, patayo sa eroplano ng mga vector na ito at nakadirekta upang ang pinakamaliit na pag-ikot mula a hanggang b sa paligid ng vector c ay counterclockwise kapag tiningnan mula sa dulong vector c
Mga formula para sa pagkalkula ng produkto ng vector ng mga vector
Vector na likhang sining dalawang vectors a = (a x; a y; a z) at b = (b x; b y; b z) sa Cartesian coordinate system ay isang vector na ang halaga ay maaaring kalkulahin gamit ang mga sumusunod na formula:
- Ang cross product ng dalawang di-zero na vectors a at b ay katumbas ng zero kung at kung ang mga vector ay collinear.
- Ang Vector c, katumbas ng cross product ng mga di-zero na vectors a at b, ay patayo sa mga vector na ito.
- a × b = -b × a
- (k a) × b = a × (k b) = k (a × b)
- (a + b) × c = a × c + b × c
Equation ng isang tuwid na linya sa isang eroplano
A) equation ng isang tuwid na linya na may koepisyent ng anggulo
Slope ng isang tuwid na linya ay tinatawag na padaplis ng anggulo ng pagkahilig ng linyang ito.
Ang slope ng isang tuwid na linya ay karaniwang tinutukoy ng titik k. Pagkatapos ay sa pamamagitan ng kahulugan.
Kung ang tuwid na linya ay parallel sa ordinate axis, kung gayon ang slope ay hindi umiiral (sa kasong ito sinasabi rin na ang slope ay napupunta sa infinity).
Ang isang positibong slope ng isang linya ay nagpapahiwatig ng pagtaas sa kanyang graph ng function, ang isang negatibong slope ay nagpapahiwatig ng isang pagbaba. Ang equation ng isang tuwid na linya na may isang angular coefficient ay may anyo na y=kx+b, kung saan ang k ay ang angular coefficient ng linya, b ay ilang tunay na numero. Gamit ang equation ng isang tuwid na linya na may isang angular coefficient, maaari mong tukuyin ang anumang tuwid na linya na hindi parallel sa Oy axis (para sa isang tuwid na linya parallel sa ordinate axis, ang angular coefficient ay hindi tinukoy).
B) mga uri ng mga equation ng tuwid na linya
Ang equation ![]() tinawag pangkalahatang equation ng linya sa ibabaw.
tinawag pangkalahatang equation ng linya sa ibabaw.
Anumang first degree equation sa dalawang variable x At y mabait ![]() , Saan A, SA At SA– ilang totoong numero, at A At SA ay hindi katumbas ng zero sa parehong oras, tumutukoy sa isang tuwid na linya sa isang hugis-parihaba na coordinate system Oxy sa eroplano, at bawat tuwid na linya sa eroplano ay binibigyan ng isang equation ng form
, Saan A, SA At SA– ilang totoong numero, at A At SA ay hindi katumbas ng zero sa parehong oras, tumutukoy sa isang tuwid na linya sa isang hugis-parihaba na coordinate system Oxy sa eroplano, at bawat tuwid na linya sa eroplano ay binibigyan ng isang equation ng form ![]() .
.
Line equation ng form , kung saan a At b– ang ilang mga tunay na numero maliban sa zero ay tinatawag equation ng isang tuwid na linya sa mga segment. Ang pangalan na ito ay hindi sinasadya, dahil ang mga ganap na halaga ng mga numero A At b katumbas ng haba ng mga segment na pinuputol ng tuwid na linya sa mga coordinate axes baka At Oy ayon sa pagkakabanggit (ang mga segment ay binibilang mula sa pinanggalingan).
Line equation ng form , kung saan x At y- mga variable, at k At b– ang ilang mga tunay na numero ay tinatawag equation ng isang tuwid na linya na may slope (k– slope)
Canonical equation ng isang linya sa isang eroplano sa isang hugis-parihaba na Cartesian coordinate system Oxy parang  , kung saan at ang ilang mga tunay na numero, at sa parehong oras ang mga ito ay hindi katumbas ng zero.
, kung saan at ang ilang mga tunay na numero, at sa parehong oras ang mga ito ay hindi katumbas ng zero.
Malinaw, ang tuwid na linya na tinukoy ng canonical equation ng linya ay dumadaan sa punto. Sa turn, ang mga numero at sa mga denominador ng mga fraction ay kumakatawan sa mga coordinate ng vector ng direksyon ng linyang ito. Kaya, ang canonical equation ng linya sa isang rectangular coordinate system Oxy sa eroplano ay tumutugma sa isang tuwid na linya na dumadaan sa isang punto at pagkakaroon ng vector ng direksyon.
Parametric equation ng isang linya sa isang eroplano kamukha  , kung saan at ang ilang mga tunay na numero, at sa parehong oras ay hindi katumbas ng zero, at ito ay isang parameter na kumukuha ng anumang mga tunay na halaga.
, kung saan at ang ilang mga tunay na numero, at sa parehong oras ay hindi katumbas ng zero, at ito ay isang parameter na kumukuha ng anumang mga tunay na halaga.
Ang mga parametric line equation ay nagtatag ng isang implicit na relasyon sa pagitan ng abscissas at ordinates ng mga puntos sa isang tuwid na linya gamit ang isang parameter (kaya ang pangalan ng ganitong uri ng line equation).
Ang isang pares ng mga numero na kinakalkula mula sa mga parametric equation ng isang linya para sa ilang tunay na halaga ng parameter ay kumakatawan sa mga coordinate ng isang tiyak na punto sa linya. Halimbawa, kapag mayroon tayo  , iyon ay, ang puntong may mga coordinate ay nasa isang tuwid na linya.
, iyon ay, ang puntong may mga coordinate ay nasa isang tuwid na linya.
Dapat tandaan na ang mga coefficient at para sa parameter sa parametric equation ng isang tuwid na linya ay ang mga coordinate ng vector ng direksyon ng tuwid na linyang ito.
Equation ng isang linya na dumadaan sa dalawang puntos
Hayaang ibigay sa espasyo ang dalawang puntos na M 1 (x 1, y 1, z 1) at M 2 (x 2, y 2, z 2), kung gayon ang equation ng linyang dumadaan sa mga puntong ito ay:

Kung ang alinman sa mga denominator ay katumbas ng zero, ang katumbas na numerator ay dapat na katumbas ng zero Sa eroplano, ang equation ng linyang nakasulat sa itaas ay pinasimple:

kung x 1 ≠ x 2 at x = x 1, kung x 1 = x 2.
Ang fraction = k ay tinatawag dalisdis tuwid.
C) pagkalkula ng anggulo sa pagitan ng dalawang tuwid na linya
kung ang dalawang linya ay binibigyan ng y = k 1 x + b 1, y = k 2 x + b 2, kung gayon ang matinding anggulo sa pagitan ng mga linyang ito ay tutukuyin bilang
 .
.
Dalawang linya ay magkatulad kung k 1 = k 2. Dalawang linya ay patayo kung k 1 = -1/ k 2.
Teorama. Ang mga linyang Ax + Bу + C = 0 at A 1 x + B 1 y + C 1 = 0 ay parallel kapag ang mga coefficient A 1 = λA, B 1 = λB ay proporsyonal. Kung din C 1 = λC, kung gayon ang mga linya ay nag-tutugma. Ang mga coordinate ng punto ng intersection ng dalawang linya ay matatagpuan bilang isang solusyon sa sistema ng mga equation ng mga linyang ito.
D) mga kondisyon para sa parallelism at perpendicularity ng dalawang tuwid na linya
Mga kondisyon para sa parallelism ng dalawang linya:
a) Kung ang mga linya ay ibinigay ng mga equation na may isang angular coefficient, kung gayon ang kinakailangan at sapat na kondisyon para sa kanilang parallelism ay ang pagkakapantay-pantay ng kanilang mga angular coefficient:
k 1 = k 2 .
b) Para sa kaso kapag ang mga linya ay ibinigay ng mga equation sa pangkalahatang anyo (6), isang kinakailangan at sapat na kondisyon para sa kanilang parallelism ay ang mga coefficient para sa kaukulang kasalukuyang mga coordinate sa kanilang mga equation ay proporsyonal, i.e.
Mga kundisyon para sa perpendicularity ng dalawang tuwid na linya:
a) Sa kaso kapag ang mga linya ay ibinigay sa pamamagitan ng mga equation (4) na may isang angular coefficient, isang kinakailangan at sapat na kondisyon para sa kanilang perpendicularity ay ang kanilang mga angular coefficient ay inverse sa magnitude at kabaligtaran sa sign, i.e.
Ang kundisyong ito ay maaari ding isulat sa anyo
k 1 k 2 = -1.
b) Kung ang mga equation ng mga linya ay ibinigay sa pangkalahatang anyo (6), kung gayon ang kondisyon para sa kanilang perpendicularity (kinakailangan at sapat) ay upang matugunan ang pagkakapantay-pantay.
A 1 A 2 + B 1 B 2 = 0.
Limitasyon sa pag-andar
A) limitasyon ng pagkakasunud-sunod
Ang konsepto ng limitasyon ay ginamit ni Newton noong ikalawang kalahati ng ika-17 siglo at ng mga mathematician noong ika-18 siglo gaya nina Euler at Lagrange, ngunit intuitive nilang naunawaan ang limitasyon. Ang unang mahigpit na mga kahulugan ng limitasyon ng pagkakasunud-sunod ay ibinigay ni Bolzano noong 1816 at Cauchy noong 1821.
Tinatawag ang numero limitasyon ng pagkakasunod-sunod ng numero, kung ang pagkakasunud-sunod ay infinitesimal, ibig sabihin, lahat ng elemento nito, simula sa isang tiyak, ay mas mababa sa ganap na halaga kaysa sa anumang paunang natukoy na positibong numero.
Kung ang isang pagkakasunod-sunod ng numero ay may limitasyon sa anyo ng isang tunay na numero, ito ay tinatawag convergent sa numerong ito. Kung hindi, ang pagkakasunud-sunod ay tinatawag divergent . Kung, bukod dito, ito ay walang limitasyon, kung gayon ang limitasyon nito ay ipinapalagay na katumbas ng kawalang-hanggan.
Bilang karagdagan, kung ang lahat ng mga elemento ng isang walang hangganang pagkakasunod-sunod, simula sa isang tiyak na numero, ay may positibong tanda, kung gayon ang limitasyon ng naturang pagkakasunud-sunod ay sinasabing plus infinity .
Kung ang mga elemento ng isang walang hangganang pagkakasunud-sunod, simula sa isang tiyak na numero, ay may negatibong tanda, pagkatapos ay sinasabi nila na ang limitasyon ng naturang pagkakasunud-sunod ay katumbas ng minus infinity .
B) limitasyon ng pag-andar
Limitasyon sa pag-andar (limitahan ang halaga ng pag-andar) sa isang naibigay na punto, na naglilimita para sa domain ng kahulugan ng isang function, ay ang halaga kung saan ang halaga ng function na isinasaalang-alang ay may gawi habang ang argumento nito ay may posibilidad sa isang partikular na punto.
Limitasyon sa pag-andar ay isang generalization ng konsepto ng isang limitasyon ng isang pagkakasunud-sunod: sa una, ang limitasyon ng isang function sa isang punto ay naunawaan bilang ang limitasyon ng isang pagkakasunud-sunod ng mga elemento ng domain ng mga halaga ng isang function na binubuo ng mga imahe ng mga punto ng isang pagkakasunud-sunod ng mga elemento ng domain ng kahulugan ng isang function na nagtatagpo sa isang naibigay na punto (ang limitasyon kung saan isinasaalang-alang); kung ang naturang limitasyon ay umiiral, kung gayon ang function ay sinasabing nagtatagpo sa tinukoy na halaga; kung ang gayong limitasyon ay hindi umiiral, kung gayon ang pag-andar ay sinasabing magkakaiba.
Limitasyon sa pag-andar- isa sa mga pangunahing konsepto ng mathematical analysis. Ang halaga ay tinatawag limitasyon (limitahan ang halaga) ng isang function sa isang punto kung para sa anumang pagkakasunud-sunod ng mga puntos na nagtatagpo ngunit hindi naglalaman ng isa sa mga elemento nito (iyon ay, sa isang butas na kapitbahayan), ang pagkakasunud-sunod ng mga halaga ng function ay nagtatagpo sa .
Ang halaga ay tinatawag limitasyon (limitahan ang halaga) ay gumagana sa punto kung para sa anumang positibong numero na kinuha nang maaga ay may katumbas na positibong numero na para sa lahat ng mga argumento na nagbibigay-kasiyahan sa kondisyon ang hindi pagkakapantay-pantay ay nasiyahan.
C) dalawang kapansin-pansin na mga limitasyon
· Ang unang kapansin-pansing limitasyon:
![]()
Mga kahihinatnan
· ![]()
· ![]()
· 
· Ang pangalawang kahanga-hangang limitasyon:
![]()
Mga kahihinatnan
1. ![]()
2. ![]()
3. ![]()
4. ![]()
5. ![]() para kay ,
para kay ,
6. ![]()
D) infinitesimal at infinites large functions
Function y=f(x) tinawag infinitesimal sa x→a o kailan x→∞, kung o , ibig sabihin. Ang infinitesimal function ay isang function na ang limitasyon sa isang partikular na punto ay zero.
kung function y=f(x) kinakatawan sa x→a bilang isang kabuuan ng isang pare-parehong numero b at infinitesimal magnitude α(x): f (x)=b+ α(x) Yung .
Sa kabaligtaran, kung , pagkatapos f (x)=b+α(x), Saan a(x)– infinitesimal sa x→a.
Bunga 1. Kung at, pagkatapos.
Bunga 2. Kung c= const, pagkatapos .
Kung ang function f(x) ay walang hanggan malaki sa x→a, pagkatapos ay function 1 /f(x) ay infinitesimal sa x→a.
Kung ang function f(x)- infinitesimal sa x→a(o x→∞) at hindi naglalaho, kung gayon y= 1/f(x) ay isang walang katapusang malaking function. Ang pinakasimpleng pag-aari ng walang hanggan maliit at walang hanggan na malalaking function ay maaaring isulat gamit ang mga sumusunod na kondisyonal na relasyon: A≠ 0
D) pagsisiwalat ng mga kawalan ng katiyakan. Ang panuntunan ng L'Hopital
pangunahing uri ng kawalan ng katiyakan: zero na hinati sa zero ( 0 hanggang 0), infinity na hinati sa infinity, zero na pinarami ng infinity, infinity minus infinity, isa sa kapangyarihan ng infinity, zero sa kapangyarihan ng zero, infinity sa kapangyarihan ng zero.

Ang panuntunan ng L'Hopital napakalawak na ginagamit para sa limitahan ang mga kalkulasyon kapag may kawalan ng katiyakan sa anyo na zero na hinati ng zero, infinity na hinati sa infinity.
Kasama sa mga uri ng kawalan ng katiyakan ang mga kawalan ng katiyakan na zero times infinity at infinity minus infinity.
Kung at kung function f(x) At g(x) ay differentiable sa isang kapitbahayan ng point , pagkatapos 
Sa kaso kung saan ang kawalan ng katiyakan ay hindi nawawala pagkatapos ilapat ang panuntunan ng L'Hopital, maaari itong ilapat muli.
Pagkalkula ng mga derivatives
A) ang panuntunan para sa pagkakaiba ng isang kumplikadong function
Hayaan na kumplikadong pag-andar , kung saan ang function ay isang intermediate argument. Ipapakita namin kung paano hanapin ang derivative ng isang kumplikadong function, alam ang derivative para sa function (ito ay tukuyin namin sa pamamagitan ng) at ang derivative para sa function.
Teorama 1. Kung ang isang function ay may derivative sa isang punto x, at ang function ay may derivative sa point (), pagkatapos ay ang complex function sa point x ay may derivative, at = .
Kung hindi, ang derivative ng isang kumplikadong function ay katumbas ng produkto ng derivative ng ibinigay na function na may paggalang sa intermediate argument at ang derivative ng intermediate argument.
B) pagkita ng kaibhan ng isang function na tinukoy sa parametrically
Hayaang ibigay ang function sa parametric form, iyon ay, sa form:
kung saan ang mga function at ay tinukoy at tuloy-tuloy sa isang tiyak na pagitan ng pagkakaiba-iba ng parameter. Hanapin natin ang mga pagkakaiba ng kanan at kaliwang bahagi ng bawat pagkakapantay-pantay:
Upang mahanap ang pangalawang derivative, ginagawa namin ang mga sumusunod na pagbabago:
![]()
B) ang konsepto ng logarithmic derivative ng isang function
Ang logarithmic derivative ng isang positibong function ay tinatawag na derivative nito. Dahil , pagkatapos ay ayon sa tuntunin ng pagkita ng kaibahan ng isang kumplikadong pag-andar ay nakukuha natin ang sumusunod na kaugnayan para sa logarithmic derivative:
 .
.
Gamit ang logarithmic derivative, madaling kalkulahin ang ordinaryong derivative sa mga kaso kung saan pinapasimple ng logarithm ang anyo ng function.
Ang kakanyahan ng pagkakaiba-iba na ito ay ang mga sumusunod: una, ang logarithm ng isang naibigay na function ay matatagpuan, at pagkatapos lamang ang derivative nito ay kinakalkula. Hayaang magbigay ng ilang function. Kunin natin ang mga logarithms ng kaliwa at kanang bahagi ng expression na ito:
At pagkatapos, ang pagpapahayag ng nais na hinalaw, ang resulta ay:
D) derivative ng inverse function
Kung ang y=f(x) at x=g(y) ay isang pares ng magkabaligtaran na function, at ang function na y=f(x) ay may derivative na f"(x), kung gayon ang derivative ng inverse function na g"( x)=1/f" (x).
Kaya, ang mga derivatives ng mutually inverse functions ay katumbas na dami. Formula para sa derivative ng inverse function:
D) derivative ng isang implicit function
Kung ang isang function ng isang variable ay inilalarawan ng equation y=f(x), kung saan ang variable y ay nasa kaliwang bahagi, at ang kanang bahagi ay nakasalalay lamang sa argumento x, pagkatapos ay sinasabi nila na ang function ay ibinigay tahasan. Halimbawa, ang mga sumusunod na function ay tahasang tinukoy:
y= kasalanan x,y=x 2+2x+5,y=lncos x.
Sa maraming problema, gayunpaman, ang function ay maaaring tukuyin pahiwatig, ibig sabihin. bilang isang equation
F(x,y)=0.
para mahanap ang derivative y′( x) ang isang tahasang tinukoy na function ay hindi kailangang i-convert sa isang tahasang anyo. Upang gawin ito, alam ang equation F(x,y)=0, gawin lang ang sumusunod:
Una kailangan mong ibahin ang magkabilang panig ng equation na may paggalang sa variable x, ipagpalagay na y− ay isang function na naiba-iba x at paggamit ng panuntunan para sa pagkalkula ng derivative ng isang kumplikadong function. Sa kasong ito, ang derivative ng zero (sa kanang bahagi) ay magiging katumbas din ng zero.
Magkomento: Kung ang kanang bahagi ay hindi zero, ibig sabihin. ang implicit equation ay
f(x,y)=g(x,y),
pagkatapos ay iniiba natin ang kaliwa at kanang bahagi ng equation.
Lutasin ang nagresultang equation para sa derivative y′( x).
Konsepto ng derivative
A) kahulugan ng derivative
Derivative ng isang function pagkakaiba-iba pagsasama.
y xx
Kahulugan ng derivative
Isaalang-alang ang function f(x x 0. Pagkatapos ay ang function f(x) ay naiba-iba sa punto x 0, at siya derivative ay tinutukoy ng formula
f′( x 0)=limΔ x→0Δ yΔ x=limΔ x→0f(x 0+Δ x)−f(x 0)Δ x.
Derivative ng isang function ay isa sa mga pangunahing konsepto ng matematika, at sa mathematical analysis ang derivative, kasama ang integral, ay sumasakop sa isang sentral na lugar. Ang proseso ng paghahanap ng derivative ay tinatawag pagkakaiba-iba. Ang inverse operation - pagpapanumbalik ng isang function mula sa isang kilalang derivative - ay tinatawag pagsasama.
Ang derivative ng isang function sa isang tiyak na punto ay nagpapakilala sa rate ng pagbabago ng function sa puntong iyon. Ang pagtatantya ng rate ng pagbabago ay maaaring makuha sa pamamagitan ng pagkalkula ng ratio ng pagbabago sa function Δ y sa isang kaukulang pagbabago sa argumentong Δ x. Sa kahulugan ng derivative, ang gayong relasyon ay isinasaalang-alang sa limitasyon sa ilalim ng kondisyong Δ x→0. Lumipat tayo sa isang mas mahigpit na pagbabalangkas:
Kahulugan ng derivative
Isaalang-alang ang function f(x), na ang domain ng kahulugan ay naglalaman ng ilang bukas na agwat sa paligid ng punto x 0. Pagkatapos ay ang function f(x) ay naiba-iba sa punto x 0, at siya derivative ay tinutukoy ng formula
f′( x 0)=limΔ x→0Δ yΔ x=limΔ x→0f(x 0+Δ x)−f(x 0)Δ x.
B) geometric na kahulugan ng derivative
Ang derivative ng function, na kinakalkula para sa isang ibinigay na halaga, ay katumbas ng tangent ng anggulo na nabuo ng positibong direksyon ng axis at ang positibong direksyon ng tangent na iginuhit sa graph ng function na ito sa punto na may abscissa:
Kung ang isang function ay may finite derivative sa isang punto, kung gayon sa kapitbahayan maaari itong tantiyahin ng isang linear function
Ang function ay tinatawag na tangent sa sa puntong Numero.
D) talahanayan ng mga derivatives ng pinakasimpleng elementarya na pag-andar

Hayaang ibigay ang vector. Unit vector sa parehong direksyon bilang  (unit vector
(unit vector  ) ay matatagpuan sa pamamagitan ng formula:
) ay matatagpuan sa pamamagitan ng formula:
 .
.
Hayaan ang axis  bumubuo ng mga anggulo na may mga coordinate axes
bumubuo ng mga anggulo na may mga coordinate axes  .Direksyon cosine ng axis
.Direksyon cosine ng axis  Ang mga cosine ng mga anggulong ito ay tinatawag na:. Kung ang direksyon
Ang mga cosine ng mga anggulong ito ay tinatawag na:. Kung ang direksyon  ibinigay ng isang unit vector
ibinigay ng isang unit vector  , kung gayon ang mga cosine ng direksyon ay nagsisilbing mga coordinate nito, i.e.:
, kung gayon ang mga cosine ng direksyon ay nagsisilbing mga coordinate nito, i.e.:
 .
.
Ang mga cosine ng direksyon ay nauugnay sa bawat isa sa pamamagitan ng kaugnayan:
Kung ang direksyon  ibinigay ng isang di-makatwirang vector
ibinigay ng isang di-makatwirang vector  , pagkatapos ay hanapin ang unit vector ng vector na ito at, paghahambing nito sa expression para sa unit vector
, pagkatapos ay hanapin ang unit vector ng vector na ito at, paghahambing nito sa expression para sa unit vector  , kumuha ng:
, kumuha ng:

Produktong scaler
Produktong tuldok dalawang vector
dalawang vector  At
At  ay isang numero na katumbas ng produkto ng kanilang mga haba at ang cosine ng anggulo sa pagitan nila:
ay isang numero na katumbas ng produkto ng kanilang mga haba at ang cosine ng anggulo sa pagitan nila:  .
.
Ang produktong scalar ay may mga sumusunod na katangian:

Kaya naman,  .
.
Geometric na kahulugan ng produkto ng tuldok: scalar product ng isang vector at isang unit vector  katumbas ng projection ng vector
katumbas ng projection ng vector  sa direksyong natukoy
sa direksyong natukoy  , ibig sabihin.
, ibig sabihin.  .
.
Ang sumusunod na talahanayan ng pagpaparami ng mga unit vector ay sumusunod mula sa kahulugan ng scalar product:  :
:
 .
.
Kung ang mga vector ay ibinibigay ng kanilang mga coordinate  At
At  , ibig sabihin.
, ibig sabihin.  ,
, , pagkatapos, pag-multiply ng mga vector na ito nang scalar at gamit ang multiplication table ng mga unit vector, nakukuha namin ang expression para sa scalar na produkto
, pagkatapos, pag-multiply ng mga vector na ito nang scalar at gamit ang multiplication table ng mga unit vector, nakukuha namin ang expression para sa scalar na produkto  sa pamamagitan ng mga coordinate ng vector:
sa pamamagitan ng mga coordinate ng vector:
 .
.
Vector na likhang sining
Cross product ng isang vector sa vector
sa vector  tinatawag na vector
tinatawag na vector  , ang haba at direksyon nito ay tinutukoy ng mga kundisyon:
, ang haba at direksyon nito ay tinutukoy ng mga kundisyon:

Ang produkto ng vector ay may mga sumusunod na katangian:

Mula sa unang tatlong katangian ay sumusunod na ang vector multiplication ng isang kabuuan ng mga vector sa isang kabuuan ng mga vector ay sumusunod sa karaniwang mga patakaran para sa pagpaparami ng mga polynomial. Kailangan mo lamang siguraduhin na ang pagkakasunud-sunod ng mga kadahilanan ay hindi nagbabago.
Ang mga pangunahing vector ay pinarami bilang mga sumusunod:

Kung  At
At  , pagkatapos ay isinasaalang-alang ang mga katangian ng produkto ng vector ng mga vectors, maaari tayong makakuha ng isang panuntunan para sa pagkalkula ng mga coordinate ng produkto ng vector mula sa mga coordinate ng mga vector ng kadahilanan:
, pagkatapos ay isinasaalang-alang ang mga katangian ng produkto ng vector ng mga vectors, maaari tayong makakuha ng isang panuntunan para sa pagkalkula ng mga coordinate ng produkto ng vector mula sa mga coordinate ng mga vector ng kadahilanan:
Kung isasaalang-alang natin ang mga panuntunan sa itaas para sa pagpaparami ng mga vector ng unit, kung gayon:
Ang isang mas compact na anyo ng pagsulat ng isang expression para sa pagkalkula ng mga coordinate ng vector produkto ng dalawang vectors ay maaaring itayo sa pamamagitan ng pagpapakilala ng konsepto ng isang determinant ng isang matrix.
Isaalang-alang natin ang espesyal na kaso kapag ang mga vectors  At
At  nabibilang sa eroplano
nabibilang sa eroplano  , ibig sabihin. sila ay maaaring katawanin bilang
, ibig sabihin. sila ay maaaring katawanin bilang  At
At  .
.
Kung ang mga coordinate ng mga vector ay nakasulat sa anyo ng talahanayan tulad ng sumusunod:  , pagkatapos ay maaari nating sabihin na ang isang parisukat na matrix ng pangalawang order ay nabuo mula sa kanila, i.e. laki
, pagkatapos ay maaari nating sabihin na ang isang parisukat na matrix ng pangalawang order ay nabuo mula sa kanila, i.e. laki  , na binubuo ng dalawang row at dalawang column. Ang bawat square matrix ay nauugnay sa isang numero, na kinakalkula mula sa mga elemento ng matrix ayon sa ilang mga patakaran at tinatawag na determinant. Ang determinant ng isang pangalawang-order na matrix ay katumbas ng pagkakaiba sa pagitan ng mga produkto ng mga elemento ng pangunahing dayagonal at pangalawang dayagonal:
, na binubuo ng dalawang row at dalawang column. Ang bawat square matrix ay nauugnay sa isang numero, na kinakalkula mula sa mga elemento ng matrix ayon sa ilang mga patakaran at tinatawag na determinant. Ang determinant ng isang pangalawang-order na matrix ay katumbas ng pagkakaiba sa pagitan ng mga produkto ng mga elemento ng pangunahing dayagonal at pangalawang dayagonal:
 .
.
Sa kasong ito:

Ang ganap na halaga ng determinant ay kaya katumbas ng lugar ng parallelogram na itinayo sa mga vectors  At
At  , magkabilang gilid.
, magkabilang gilid.
Kung ihahambing natin ang expression na ito sa formula ng produkto ng vector (4.7), kung gayon:
|
|

Ang expression na ito ay isang formula para sa pagkalkula ng determinant ng isang third-order matrix mula sa unang hilera.
kaya:

Determinant ng isang third-order matrix ay kinakalkula tulad ng sumusunod:


at ang algebraic na kabuuan ng anim na termino.
Ang formula para sa pagkalkula ng determinant ng isang third-order matrix ay madaling matandaan kung gagamit ka tuntuninSarrus, na binubuo ng mga sumusunod:
Ang bawat termino ay produkto ng tatlong elemento na matatagpuan sa iba't ibang column at iba't ibang row ng matrix;
Ang mga produkto ng mga elemento na bumubuo ng mga tatsulok na may gilid na kahanay sa pangunahing dayagonal ay may plus sign;
Ang mga produkto ng mga elemento na kabilang sa pangalawang dayagonal at dalawang produkto ng mga elemento na bumubuo ng mga tatsulok na may gilid na parallel sa pangalawang dayagonal ay may minus sign.

![]()